Shared Mobility#
The shared mobility module in POLARIS implements the demand modeling and supply operation of shared mobility services in urban transportation systems. The Federal Transit Administration defines shared mobility as:
“Shared mobility is a term used to describe a variety of transportation services and resources that are shared among users, either concurrently or one after another. This includes services such as carsharing, ridesharing (carpooling and vanpooling), on-demand ride services (ride-hailing and ride-pooling), micro-mobility services (e-scooters and bikesharing), and on-demand delivery services (food, cargo, etc.).”
The POLARIS agent-based modeling framework represents each entity in the shared mobility module as agents—ranging from individual operators, vehicles in a fleet, docked and dockless e-scooters, to individual travelers and travel requests. As a result, POLARIS can model shared services with a variety of modes, capacities, delivery types, and other operational strategies. The goal of the module is to simulate and capture the behavioral and operational dynamics of shared mobility services, as well as the dynamic interactions between riders, drivers, vehicles, and the transportation network. The model includes demand generation, ride-matching, routing, fleet management, service optimization, and integration with other transportation modes to evaluate system-wide impacts on mobility and sustainability.
By modeling real-time decision-making and operational strategies, this module enables analysis of existing and emerging shared mobility services and mobility technologies. It also assesses their effects on traffic flow, emissions, and urban mobility, making it a valuable tool for mobility operators, policymakers, and researchers exploring sustainable and efficient transportation solutions.
ℹ️ NOTE
POLARIS is capable of modeling shared mobility modes such as conventional taxis and on-demand modes such as those offered by Transportation Network Companies (TNCs). Vehicle systems that are conventionally or electrically powered, as well as manual and autonomous (AV) operation can be modeled. Throughout this documentation, terms such as TNCs, shared AVs (or SAVs), electric SAVs (or SAEVs) are used interchangeably to refer to auto-based shared mobility services.
Supply-Demand Interactions#
Shared mobility operators manage fleets of vehicles with varying service types, vehicle types, seating configurations, and other characteristics. Each operator can employ a range of operational strategies, including assignment, charging, repositioning, and parking. Requests obtained through demand generated by the agents in simulation are passed through operators to be centrally matched to vehicles based on policies, service and seating preferences. Once a request is assigned to a vehicle, it is added to the vehicle’s queue. POLARIS computes pickup and drop-off orders (heuristically or optimally, based on service quality) and routes the vehicle, along with the associated passengers, through the network. These shared vehicles share the network capacity alongside other passenger and freight demand, and contribute to congestion that impact decisions across all types of agents in the simulation. The figure below provides a high-level overview of the interaction between the Supply and Demand components in POLARIS.
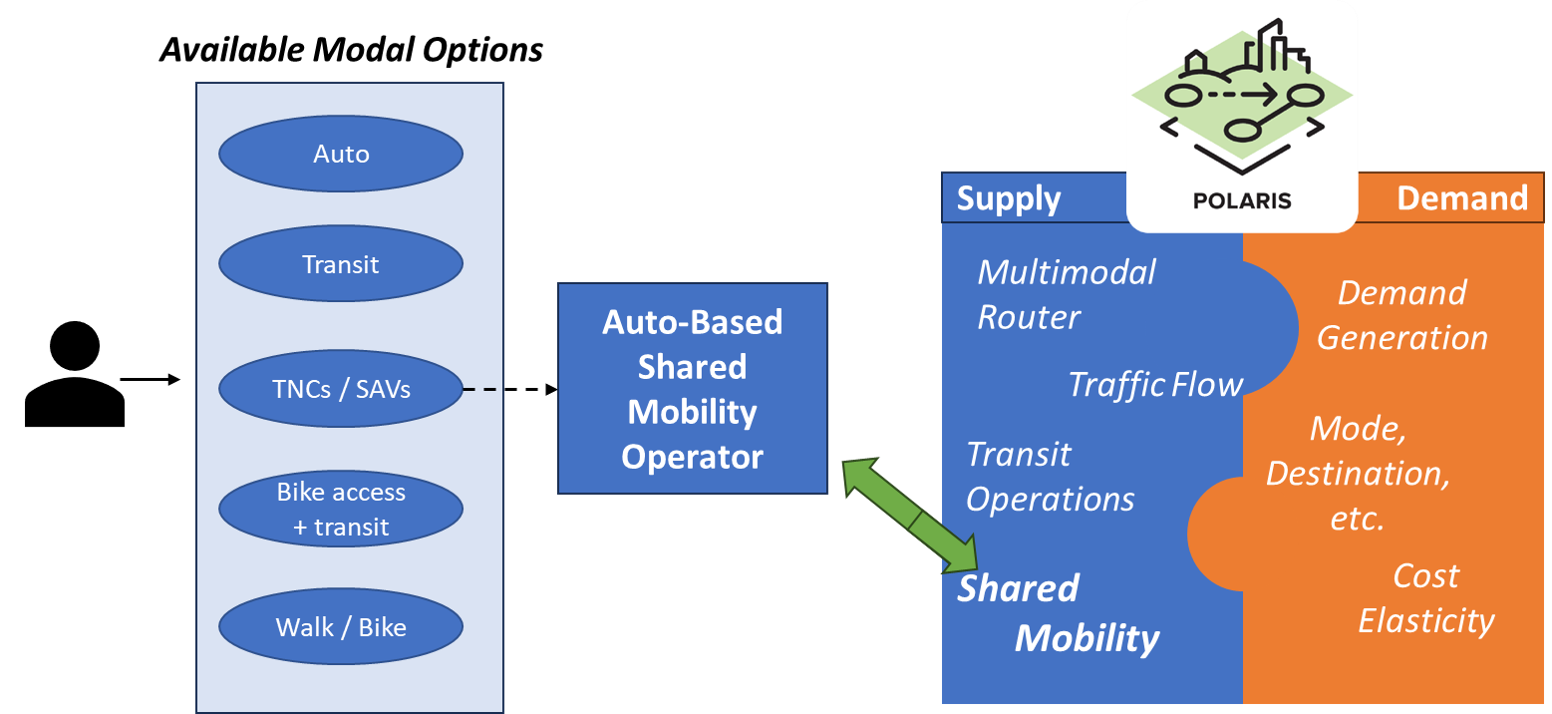
The remaining sub-sections describe each of the shared mobility components in detail.