Releases#
The following headers cover all published releases of the POLARIS framework.
2025.12 - Release December 2025#
Documentation (http://polaris.taps.anl.gov) has significantly improved. Some highlights of the improvements are listed here:
Split documentation website between the release version and latest development version (http://polaris.taps.anl.gov/latest_dev)
Explanation of the Polaris run process, including an explanation of convergence and convergence criteria
Elaboration on run parameters for runs and individual iterations
Analysis section was expanded with examples and further options
Further explanation of traffic skims, file setup, and variables stored
Expanded on SVTrip and AutonomieExpress
Wrote sections on network transit editing and calibration
This is supported by over 246 merge requests to our polaris-studio suite of supporting tools. These again reflect our areas of focus with large numbers of validations (to ensure stability) and documentation commits. Analytics and high performance computing changes also factored heavily in the mix.
Major Features:
Added
restore()function to Polaris, letting users generate runnable SQLite from tables stored in CSVAdded langragian coordinate path reader
Added function to normalize result MOE based on the available supply file
Added new KPI comparisons (trip cost, etc.)
Updated error reporting to be less intimidating and more clear about the actual error
Fixed runtime and installation bugs (spatialite installation, directory handling, etc.)
Under the hood this release contains of 138 merged branches to the core POLARIS c++ engine including 4 major new features.
[New] School location choice updated with better handling of small vs large educational institutions
[New] Significant improvement to parking choice modelling including addition of a more realistic price model
[New] Explicitly model managed lanes for autonomous vehicles
[New] Mixed logit mode choice model
Actual simulated VOTT for all trips now stored in trip table
Ability to set tolls for MDT/HDT separately to LDT
Better integration of custom memory allocation with standard c++ new/delete keywords
Weather and Accident Events from ITS
Create Link_Data and Intersection_Data class for API access
Bigger and better stacktrace lib
Add significant and useful metadata to Skim OMX and Results HDF5 files
Better handling of determinism in stochastic processes through separation of random number generation and evaluation
Built in Basic Function Profiler
Updates to population synthesis regions
Improvements in the freight mode choice model including cost parameters and transfer port selection.
Add freight autonomous vehicles and autonomous truck operators for long-haul shipment transportation.
2025.06 - Release June 2025 (PUG’25)#
This release is aligned with the Polaris User Group meeting in Chicago June 2025 and brings major new capabilities in the freight modelling space with the inclusion of the first version of POLARIS’ integrated Agent Based Freight framework. This includes a new database (Model-Freight.sqlite) to represent the various entities that make up the freight ecosystem along with core algorithms for tour formation, routing and point of entry determination.
Documentation (http://polaris.taps.anl.gov) has significantly improved across all three pillars (C++, Python, QGIS) of the POLARIS eco-system. Some highlights of the improvements are listed here:
Performance effects of trajectory sampling decisions
Traffic flow theory
Random choice theory and practice
Routing parameters and theory
Generally applicable training slide decks from PUG 2024
Improved results database and H5 Structure
Common macros
Bloomington demo model
The following major features have been added to Polaris-Studio
Common geometry layers (County, Census Tracts) added to Supply database
Static assignment using Aequilibrae
Extraction of demand data for use with aggregate modelling platforms
Automated Network simplification
GMNS and Overture maps importer
Matrix Converter to convert skims between zone systems
Singularity/Apptainer image available with all dependencies
Calibrating capacities using speed by link type and time-period
Further to the freight modelling framwwork, the following major updates have been made to the underlying transport simulation engine:
TNC - Improvements to default, Corner-to-Corner and Alonso-Mora matching strategies
Core Speed and Stability Updates
Updated Database structures
Traffic simulator supports Lagrangian Coordinates for increased temporal granularity and better representation of the fundamental diagram
2025.01 - Release Jan 2025#
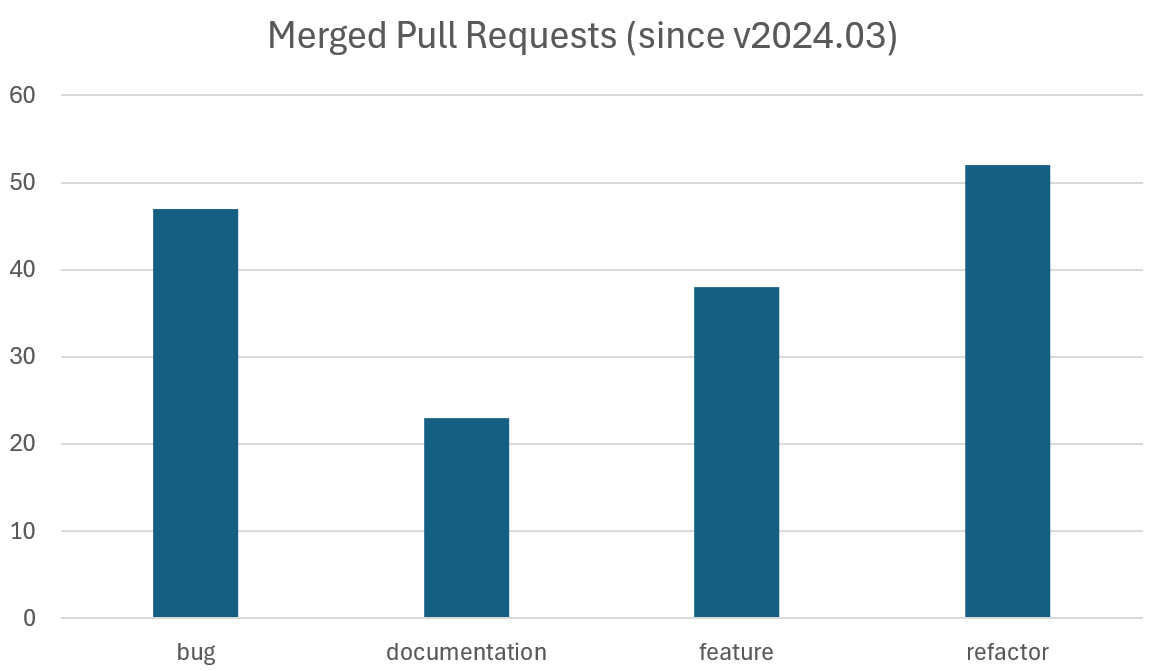
This release comprises 160 merged changes. In line with our current focus on improving the stability and maintainability of the codebase, the majority of these are refactoring, bug fix and documentation focussed changes. However there were still 38 merge requests which added new functionality to the code base.
The major features added are:
Support for licensing on linux based operating systems
Migration of all path data from SQLite -> HDF5
Support for Left Hand Side of driving
Integration of OR-Tools support for greater flexibility in choice of optimisation solver
Increased granularity of long-term decision making (telecommute frequency, work location, etc)
Reorganize Core POLARIS to allow distribution as a header/library style API (Core Task 2.2)
Updated Telecommuting Model
This is supported by over 200 merge requests on polaris-studio. These again reflect our areas of focus with large numbers of validations (to ensure stability) and documentation commits. Analytics and high performance computing changes also factored heavily in the mix.

Major Features
NUMA awareness for better performance on multiple CPU systems
Tooling for import of DOT fixed-trip tables
“Import from Overture maps” functionality
Better control over workplace stabilization and calibration iterations
Substantial increase in captured and plotted KPI metrics
Expanded data validations and checks across all databases
2024.03 - Released March 2024#
Our first official release of POLARIS via PyPi!!
This release sets the framework for our goal of reducing the learning curve for POLARIS with online documentation and simplified installation (just pip install polaris-studio).
POLARIS
Windows only licenced executables
PolarisStudio
QPolaris